|
|
|
|
Azimuthally anisotropic 3D velocity continuation |
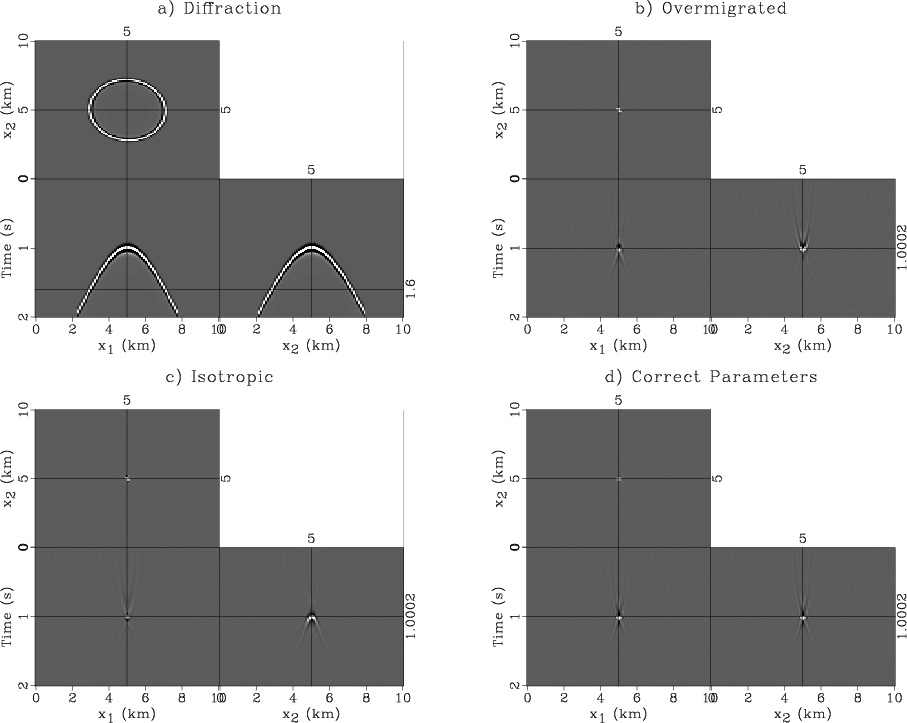
Figure 1a shows a single diffraction event, modeled using equation 1.
The fastest direction of propagation is at ![]() =105
=105![]() counter-clockwise from the
counter-clockwise from the ![]() axis, with
axis, with ![]() =3.50 km/s.
The data in Figure 1a were modeled with
=3.50 km/s.
The data in Figure 1a were modeled with ![]() =7% anisotropy, which may be quite high for most field cases, but it was chosen to allow the azimuthal variations in diffraction moveout to be visibly pronounced.
As described above, we first stretch the time axis from
=7% anisotropy, which may be quite high for most field cases, but it was chosen to allow the azimuthal variations in diffraction moveout to be visibly pronounced.
As described above, we first stretch the time axis from ![]() to
to ![]() and take the 3D Fourier transform of the data.
Then we apply the phase-shift prescribed by equation 18 for a range of
and take the 3D Fourier transform of the data.
Then we apply the phase-shift prescribed by equation 18 for a range of ![]() .
We found it more intuitive to specify the parameter ranges in terms of
.
We found it more intuitive to specify the parameter ranges in terms of ![]() ,
, ![]() , and
, and ![]() , and then convert them at each step into the three parameters of
, and then convert them at each step into the three parameters of ![]() for use in equation 18.
The inverse of the in-line velocity squared
for use in equation 18.
The inverse of the in-line velocity squared ![]() is equivalent to
is equivalent to ![]() , which, along with a given fast azimuth
, which, along with a given fast azimuth ![]() and percent anisotropy
and percent anisotropy ![]() , can be used to calculate
, can be used to calculate ![]() and
and ![]() using equations 3-5.
Last, we apply the 3D inverse Fourier transform and unstretch from
using equations 3-5.
Last, we apply the 3D inverse Fourier transform and unstretch from ![]() to
to ![]() to obtain the 6D image volume.
Examples from the image volume using incorrect parameters are shown in Figures 1b-1c.
The correct parameters are used in Figure 1d, where the image is well-focused.
to obtain the 6D image volume.
Examples from the image volume using incorrect parameters are shown in Figures 1b-1c.
The correct parameters are used in Figure 1d, where the image is well-focused.
|
|---|
|
images
Figure 1. (a) A single azimuthally anisotropic diffraction. (b) The diffraction migrated by velocity continuation using correct parameters except |
|
|
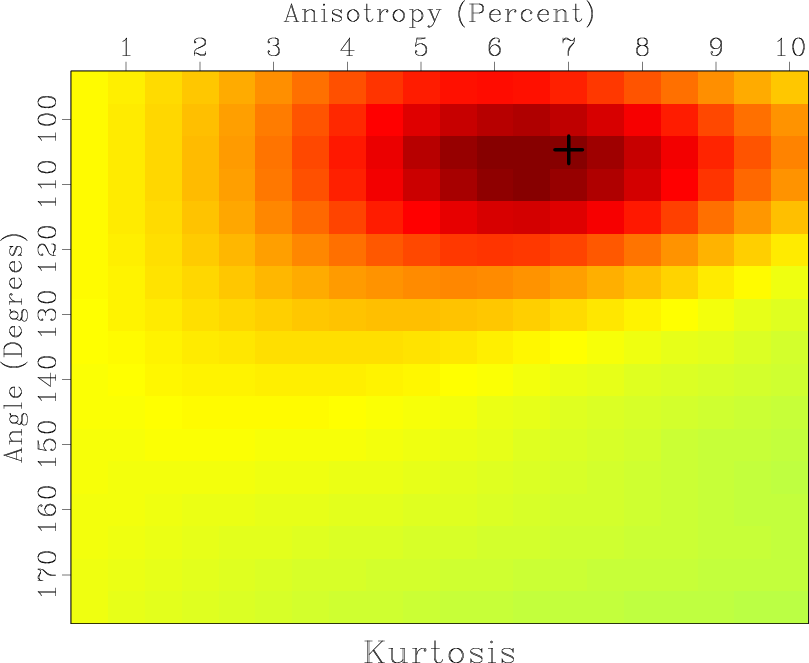
Since only a single diffraction is present in this example, we can measure kurtosis over a window spanning the entirety of each 3D image, reducing the kurtosis volume from 6D to 3D.
Figure 2 is a 2D slice of the kurtosis volume at the correct
![]() value of 0.0935 = 1/(3.27 km/s)
value of 0.0935 = 1/(3.27 km/s)![]() .
The peak of the kurtosis map is near the correct values of
.
The peak of the kurtosis map is near the correct values of ![]() =7 and
=7 and ![]() =105
=105![]() .
Once the peak of the kurtosis map is identified, one could refine the increments around the peak to yield more accurate estimates.
The physical limitations of resolving azimuthal velocity parameters are discussed by Al-Dajani and Alkhalifah (2000).
.
Once the peak of the kurtosis map is identified, one could refine the increments around the peak to yield more accurate estimates.
The physical limitations of resolving azimuthal velocity parameters are discussed by Al-Dajani and Alkhalifah (2000).
In practice, a conventional in-line 2D velocity analysis directly yields ![]() from
from ![]() , so Figure 2 could illustrate a realistic scenario for using 3D velocity continuation to improve upon a previous isotropic velocity model.
In such a case, one would use previous
, so Figure 2 could illustrate a realistic scenario for using 3D velocity continuation to improve upon a previous isotropic velocity model.
In such a case, one would use previous ![]() picks to hold
picks to hold ![]() constant, and then effectively test a variety of
constant, and then effectively test a variety of ![]() and
and ![]() values.
Since
values.
Since ![]() and
and ![]() are measured with respect to the survey coordinates, either (or both) can be measured independently via a single-azimuth semblance scan, along
are measured with respect to the survey coordinates, either (or both) can be measured independently via a single-azimuth semblance scan, along ![]() or
or ![]() , respectively.
The best isotropic velocity based on a fully multiazimuth semblance scan will generally not represent either
, respectively.
The best isotropic velocity based on a fully multiazimuth semblance scan will generally not represent either ![]() or
or ![]() , but it can help limit the range of test parameters.
Note that our method does not require prior knowledge of the velocity model, but without prior knowledge, the kurtosis measure remains a 6D volume.
Although more difficult to visualize, the 6D kurtosis volume is computationally just as easily scanned for optimal imaging parameters as the 2D map in Figure 2.
, but it can help limit the range of test parameters.
Note that our method does not require prior knowledge of the velocity model, but without prior knowledge, the kurtosis measure remains a 6D volume.
Although more difficult to visualize, the 6D kurtosis volume is computationally just as easily scanned for optimal imaging parameters as the 2D map in Figure 2.
|
|---|
|
focus
Figure 2. Kurtosis values for the velocity continuation of the diffraction in Figure 1a. The map covers a range of anisotropy and angle values with an increment in |
|
|
In the next example, we illustrate the concept of applying 3D
anisotropic velocity continuation to diffraction imaging and fracture
characterization.
Figure 3a shows a 3D synthetic
post-stack diffraction data set, equivalent to the ideal separation of
diffractions from specular reflections in post-stack data following
Fomel et al. (2007).
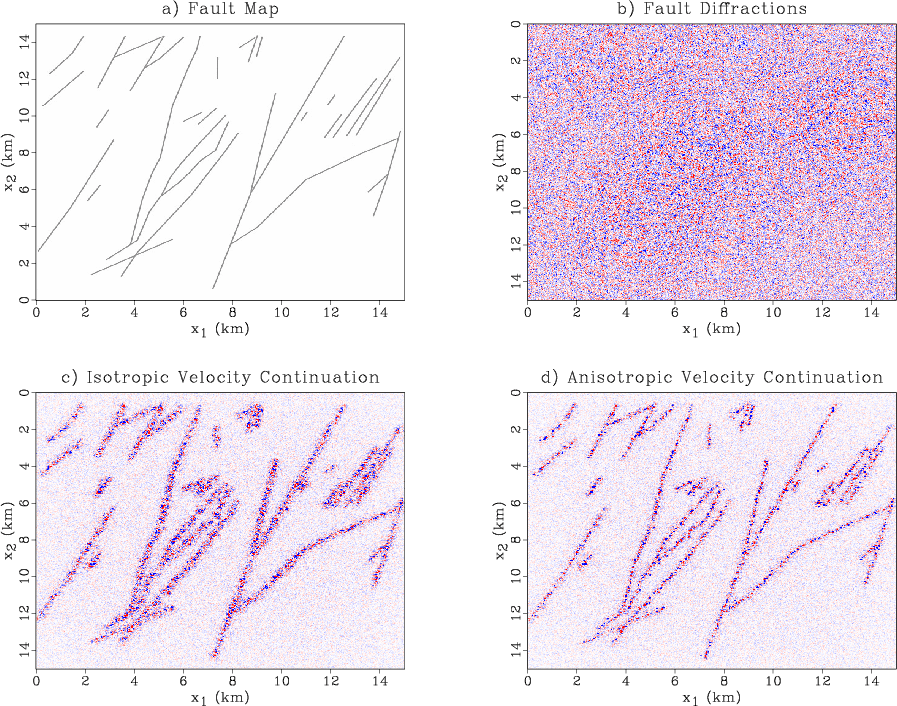
A fault map from Hargrove (2010) (shown in Figure 3a) was digitized and used to create a 3D fracture model.
Each fault location was used to generate a point diffraction in a homogeneous anisotropic
background via equation 1.
A timeslice of the modeled diffraction data is shown in Figure 3b.
The faults in the model typically have a strike of 112![]() , and
in cases where faults and nearby fractures (which more likely influence the seismic velocity)
are similarly aligned, the fast direction of
seismic wave propagation tends to align with their strike.
By assuming a typical tight sandstone velocity of
, and
in cases where faults and nearby fractures (which more likely influence the seismic velocity)
are similarly aligned, the fast direction of
seismic wave propagation tends to align with their strike.
By assuming a typical tight sandstone velocity of ![]() =4.0 km/s with 3%
anisotropy, we choose the modeling
=4.0 km/s with 3%
anisotropy, we choose the modeling ![]() to be comprised of
to be comprised of
![]() =0.0659,
=0.0659, ![]() =0.0631, and
=0.0631, and ![]() =0.0014 (all in s
=0.0014 (all in s![]() /km
/km![]() ).
This results in a fast velocity direction along the strike of the faults.
In Figure 3d, we see that 3D velocity continuation using the
correct parameters (again found by maximum kurtosis) allows the faults
to be clearly imaged.
If an intermediate isotropic velocity model is used, as in Figure 3c,
the diffractions are still imaged, but they are not as well-focused compared to
the anisotropically migrated diffractions in Figure 3d.
Conventionally, diffraction arrivals such as
those in Figure 3a may be viewed as noise, but by
separating them and treating them as signal, we can see here that
imaging of steep and detailed features while simultaneously extracting
anisotropy information may be possible.
).
This results in a fast velocity direction along the strike of the faults.
In Figure 3d, we see that 3D velocity continuation using the
correct parameters (again found by maximum kurtosis) allows the faults
to be clearly imaged.
If an intermediate isotropic velocity model is used, as in Figure 3c,
the diffractions are still imaged, but they are not as well-focused compared to
the anisotropically migrated diffractions in Figure 3d.
Conventionally, diffraction arrivals such as
those in Figure 3a may be viewed as noise, but by
separating them and treating them as signal, we can see here that
imaging of steep and detailed features while simultaneously extracting
anisotropy information may be possible.
|
|---|
|
images-mig-all
Figure 3. (a) Fault map from Northwest Scotland (Hargrove, 2010) used to model diffraction data. (b) Synthetic post-stack diffraction data modeled using equation 1 and a 3D model based on the fault map in (a). (c) Diffractions from (b) migrated using an isotropic velocity model. (d) Diffractions from (b) migrated by anisotropic 3D velocity continuation. |
|
|
|
|
|
|
Azimuthally anisotropic 3D velocity continuation |