|
|
|
|
Waves and Fourier sums |
The waveform in equation (31) often arises in practice
(as the 2-D Huygens wavelet).
Because of the discontinuities on the left side of equation (31),
it is not easy to visualize.
Thinking again of the time derivative
as a convolution with the doublet
![]() ,
we imagine the 2-D Huygen's wavelet as a positive impulse followed
by negative signal decaying as
,
we imagine the 2-D Huygen's wavelet as a positive impulse followed
by negative signal decaying as ![]() .
This decaying signal is sometimes called the ``Hankel tail.''
In the frequency domain
.
This decaying signal is sometimes called the ``Hankel tail.''
In the frequency domain
![]() has a 90 degree phase angle and
has a 90 degree phase angle and
![]() has a 45 degree phase angle.
has a 45 degree phase angle.
for (i=0; i < nw; i++) {
om = -2.*SF_PI*i/n;
cw.r = cosf(om);
cw.i = sinf(om);
cz.r = 1.-rho*cw.r;
cz.i = -rho*cw.i;
if (inv) {
cz = sf_csqrtf(cz);
} else {
cz2.r = 0.5*(1.+rho*cw.r);
cz2.i = 0.5*rho*cw.i;
cz = sf_csqrtf(sf_cdiv(cz2,cz));
}
cf[i].r = cz.r/n;
cf[i].i = cz.i/n;
}
|
In practice, it is easiest to represent
and to apply the 2-D Huygen's wavelet in the frequency domain.
Subroutine halfint() ![]() is provided for that purpose.
Instead of using
is provided for that purpose.
Instead of using
![]() which
has a discontinuity at the Nyquist frequency
and a noncausal time function,
I use the square root of a causal representation
of a finite difference, i.e.
which
has a discontinuity at the Nyquist frequency
and a noncausal time function,
I use the square root of a causal representation
of a finite difference, i.e. ![]() ,
which is well behaved at the Nyquist frequency
and has the advantage that the modeling operator is causal
(vanishes when
,
which is well behaved at the Nyquist frequency
and has the advantage that the modeling operator is causal
(vanishes when ![]() ).
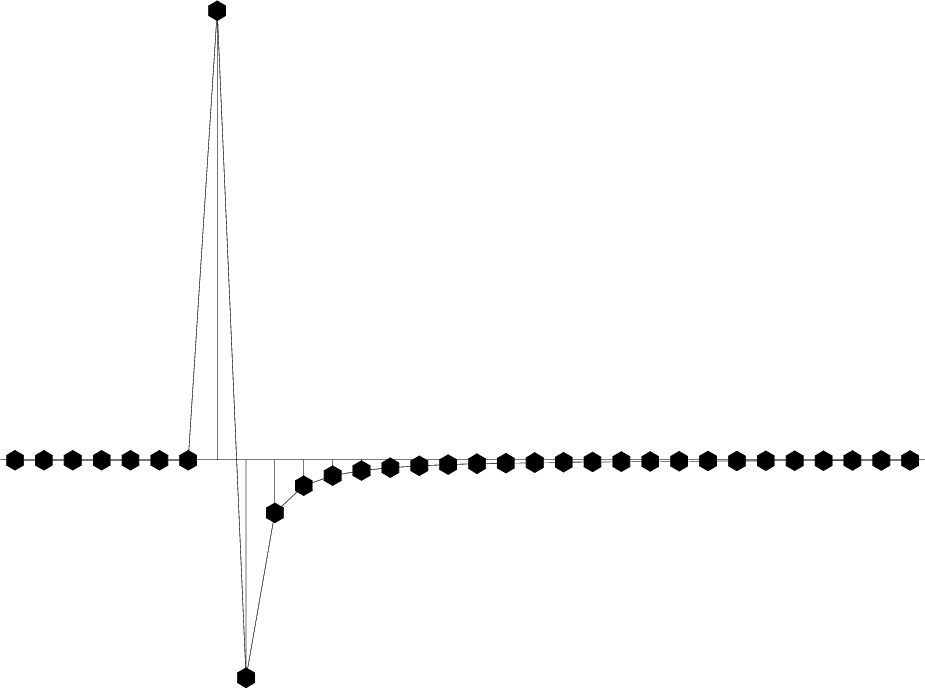
Passing an impulse function into subroutine halfint()
gives the response seen in Figure 9.
).
Passing an impulse function into subroutine halfint()
gives the response seen in Figure 9.
|
hankel
Figure 9. Impulse response (delayed) of finite difference operator of half order. Twice applying this filter is equivalent to once applying |
|
|---|---|
|
|
|
|
|
|
Waves and Fourier sums |