|
|
|
|
First-break traveltime tomography with the double-square-root eikonal equation |
The DSR eikonal equation can be derived by considering a ray-path and its segments between two depth levels.
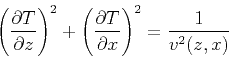
Figure 1 illustrates a diving ray (Zhu et al., 1992) in 2-D with velocity ![]() . We denote
. We denote
![]() as the total traveltime of the ray-path beneath depth
as the total traveltime of the ray-path beneath depth ![]() , where
, where ![]() and
and ![]() are sub-surface
receiver and source lateral positions, respectively.
are sub-surface
receiver and source lateral positions, respectively.
|
|---|
|
raypath
Figure 1. A diving ray and zoom-in of the ray segments between two depth levels. |
|
|
At both source and receiver sides the traveltime satisfies the eikonal equation, therefore
Equation 2 has a singularity when
![]() , in which case the slowness
vectors at
, in which case the slowness
vectors at ![]() and
and ![]() sides are both horizontal and equation 2 reduces to
sides are both horizontal and equation 2 reduces to
Note that equations 2 and 3 describe ![]() in full prestack domain
in full prestack domain
![]() by allowing not only receivers but also sources to change
positions. In contrast, the eikonal equation
by allowing not only receivers but also sources to change
positions. In contrast, the eikonal equation
|
|---|
|
root
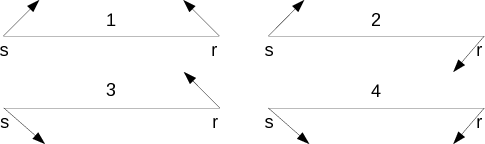
Figure 2. All four branches of DSR eikonal equation from different combination of upward or downward pointing of slowness vectors. Whether the slowness vector is pointing leftward or rightward does not matter because the partial derivatives with respect to |
|
|
Similarly to the eikonal equation, the DSR eikonal equation is a nonlinear first-order partial differential equation. Its solutions include in general not only first-breaks but all arrivals, and can be computed by solving separate eikonal equations for each sub-surface source-receiver pair followed by extracting the traveltime and putting the value into prestack volume. However, such an implementation is impractical due to the large amount of computations. Meanwhile, for first-break tomography purposes, we are only interested in the first-arrival solutions but require an efficient and accurate algorithm. In this regard, a finite-difference DSR eikonal solver analogous to the fast-marching (Sethian, 1999) or fast-sweeping (Zhao, 2005) eikonal solvers is preferable.
In upwind discretizations of the DSR eikonal equation on the grid in ![]() domain, one has to make a decision
about the
domain, one has to make a decision
about the ![]() -slice, in which the finite differences are taken to approximate
-slice, in which the finite differences are taken to approximate
![]() and
and
![]() . In Figure 1, it appears natural to approximate these partial
derivatives in the
. In Figure 1, it appears natural to approximate these partial
derivatives in the ![]() -slice below
-slice below ![]() . We refer to the corresponding scheme as explicit, since
it allows to directly compute the grid value
. We refer to the corresponding scheme as explicit, since
it allows to directly compute the grid value ![]() based on the already known
based on the already known ![]() values from the
next-lower
values from the
next-lower ![]() . An alternative implicit scheme is obtained by approximating
. An alternative implicit scheme is obtained by approximating
![]() and
and
![]() in the same
in the same ![]() -slice as
-slice as ![]() , which results in a coupled system of
nonlinear discretized equations. In Appendix A, we prove the following:
, which results in a coupled system of
nonlinear discretized equations. In Appendix A, we prove the following:
In practice, we find that, for moderate velocity variations, the first-breaks correspond only to causal branches. An example in Synthetic Model Examples section serves to illustrate this observation. Therefore, for efficiency, we turn off the non-causal branch post-processings in forward modeling and base the tomography solely on equations 1 and 3.
|
|
|
|
First-break traveltime tomography with the double-square-root eikonal equation |