|
|
|
|
A probabilistic approach to seismic diffraction imaging |
We illustrate the function of the probabilistic diffraction imaging method and its robustness to noise on a synthetic model consisting of random diffractions in a constant velocity gradient media recreated from Decker et al. (2017a).

|
|---|
|
diffr3
Figure 7. Synthetic dataset consisting of diffractions in constant velocity gradient media modeled for 24 offsets with a 50 m increment. |
|
|
Figure 7 contains 24 offsets of modeled diffraction data with no added noise. Diffraction data are slope decomposed and OVC is performed over a range of plausible migration velocities. As was the case for the toy model example, we generate partial images and weights as a function of continuation velocity for each midpoint. This process is illustrated for gathers centered below 3.62 km in Figure 8. The top left box plot of Figure 8 contains partial images in velocity generated by stacking the OVC output,
![]() over slope,
over slope, ![]() . The lower row of Figure 8 shows the weights that will be applied to that partial image. The lower left box plot contains
. The lower row of Figure 8 shows the weights that will be applied to that partial image. The lower left box plot contains ![]() , the image semblance calculated according to Equation 3. Using this semblance, the expectation velocity,
, the image semblance calculated according to Equation 3. Using this semblance, the expectation velocity, ![]() , and its variance,
, and its variance,
![]() , are calculated according to Equations 4 and 5. A normal distribution is fit to that velocity and variance according to Equation 6, generating
, are calculated according to Equations 4 and 5. A normal distribution is fit to that velocity and variance according to Equation 6, generating ![]() as shown in the lower middle box plot.
Although
as shown in the lower middle box plot.
Although ![]() , the expectation velocity, does not always completely track the true velocity, it is always within one standard deviation. Expectation velocity tends to drift away from the true velocity in the shallow portion of the synthetic, which could be explained by the fact that the shallowest diffractions in the model occur at 0.8 s. Thus, less information is available in the shallow portion to guide the expectation velocity. The right box plot displays
, the expectation velocity, does not always completely track the true velocity, it is always within one standard deviation. Expectation velocity tends to drift away from the true velocity in the shallow portion of the synthetic, which could be explained by the fact that the shallowest diffractions in the model occur at 0.8 s. Thus, less information is available in the shallow portion to guide the expectation velocity. The right box plot displays ![]() , a weight based on how quickly
, a weight based on how quickly ![]() changes in space.
changes in space.

|
|---|
|
synth-weights3a-0
Figure 8. Illustration of the probabilistic diffraction imaging process on |
|
|
The three weights are multiplied together to provide the top center box plot of Figure 8, the combined weight. Multiplying the partial images in the top left box plot of Figure 8 by this combined weight provides the weighted partial images shown on the right box plot.




|
|---|
|
synth-diffr-response,synth-det-img,synth-pathint-img,synth-prob-dimage
Figure 9. Noiseless synthetic model imaging comparison: (a) ideal image consisting of synthetic model reflectivity convolved with a 50 Hz peak frequency Ricker wavelet; (b) deterministic image created by migrating the noiseless synthetic data using its true velocity; (c) equal weight path integral image generated by stacking |
|
|
As was the case with the toy model example used in the methodology section, we generate a suite of images to compare imaging methods on this noiseless synthetic. Figure 9a shows an ideal image of this synthetic model consisting of the reflectivity model convolved with a 50 Hz peak frequency Ricker wavelet. Figure 9b contains the deterministic image created using migration with the correct velocity. Figure 9c contains an equal weight path integral image generated by stacking the partial images in the top left box plot of Figure 8 over velocity for each midpoint. Figure 9d contains our probabilistic diffraction image, generated by stacking the weighted partial images shown in the top right box plot of Figure 8 over velocity for every midpoint.
We also create a series of gathers to illustrating the contribution of different wavefield components to the images. Stacking each of these gathers over slope creates the traces at ![]() km in their corresponding images. Figure 10a contains an ``ideal gather'' generated by warping the ``ideal image'' in Figure 9a to squared time, decomposing it into constituent slope components, and warping the slope decomposed image back to time. Figure 10b contains a gather contributing to the deterministic image, Figure 9b. This gather is generated by selecting
km in their corresponding images. Figure 10a contains an ``ideal gather'' generated by warping the ``ideal image'' in Figure 9a to squared time, decomposing it into constituent slope components, and warping the slope decomposed image back to time. Figure 10b contains a gather contributing to the deterministic image, Figure 9b. This gather is generated by selecting
![]() for the true migration velocity. Figure 10c contains a gather corresponding to the equal weight image, Figure 9c. It is constructed by stacking the slope decomposed partial images in velocity,
for the true migration velocity. Figure 10c contains a gather corresponding to the equal weight image, Figure 9c. It is constructed by stacking the slope decomposed partial images in velocity,
![]() over velocity. Figure 10d contains a gather corresponding to the probabilistic diffraction image, Figure 9d. It is generated by multiplying the combined weights and the slope decomposed partial images in velocity and stacking over velocity.
over velocity. Figure 10d contains a gather corresponding to the probabilistic diffraction image, Figure 9d. It is generated by multiplying the combined weights and the slope decomposed partial images in velocity and stacking over velocity.




|
|---|
|
synth-diffr-response-txp-0,synth-slice-tpx-0,synth-const-gath-0,synth-wtd-gath-0
Figure 10. Slope gathers centered at 3.62 km for the noiseless synthetic corresponding to the: (a) ideal image, Figure 9a; (b) deterministic image, Figure 9b; (c) equal weight image, Figure 9c; (d) the probabilistic diffraction image, Figure 9d. |
|
|
In this noiseless example, the deterministic image in Figure 9b is unsurprisingly able to image most of the diffractions in the ideal image, Figure 9a. This is because in this example, the deterministic imaging process receives perfect apriori knowledge of the subsurface velocity field, so it would be expected to be extremely effective at imaging diffractions. Notice that in the process of modelling and migration, the dynamic range of diffractions appears to be amplified in the deterministic image relative to the ideal image, which consists of the reflectivity model convolved with a wavelet. Diffractions which are weak in the ideal image appear weaker in the deterministic image, and strong diffractions appear stronger. An example of this behavior is in the cluster of weak diffractions around 1.55 s between 3 and 4 km, which are relatively more energetic and better resolved in Figure 9a than Figure 9b. The deterministic image also has slightly poorer lateral resolution of diffractions than the ideal image. The deterministic gather, Figure 10b appears similar to the ideal gather in Figure 10ak although energy is primarily confined to slopes between -1 and 1 s![]() /km. Energy in these gathers that is flat corresponds to diffractions immediately below the gather. Energy that is sloping correlates to diffractions away from the gather's midpoint. The greater the slope of energy in the gather, the further away the event is. For example, the sloping event centered around 1.15 s in the ideal gather, Figure 9a, corresponds to a strong diffraction event occurring around 1.15 s below 3.5 km, slightly to the left of this gather which is centered at 3.62 km. Only diffraction events events that are nearly flat in these gathers will be stationary upon stacking. The sloping events will interfere destructively with themselves, as is the case with the sloping event centered around 1.15 s, which does not appear in the ideal image at 3.62 km, although some energy is present there in the deterministic image, Figure 9b because diffractions in that image are less spatially focused and thus wider.
/km. Energy in these gathers that is flat corresponds to diffractions immediately below the gather. Energy that is sloping correlates to diffractions away from the gather's midpoint. The greater the slope of energy in the gather, the further away the event is. For example, the sloping event centered around 1.15 s in the ideal gather, Figure 9a, corresponds to a strong diffraction event occurring around 1.15 s below 3.5 km, slightly to the left of this gather which is centered at 3.62 km. Only diffraction events events that are nearly flat in these gathers will be stationary upon stacking. The sloping events will interfere destructively with themselves, as is the case with the sloping event centered around 1.15 s, which does not appear in the ideal image at 3.62 km, although some energy is present there in the deterministic image, Figure 9b because diffractions in that image are less spatially focused and thus wider.
The equal weight image, Figure 9c, resolves many of the diffractions visible in the ideal image, Figure 9a but with significantly reduced spatial resolution. The increase in dynamic range visible in the deterministic image, Figure 9b is also visible here, and often diffractions which are separate in the ideal image appear merged in the equal weight image. It is often difficult to discern individual weak diffraction events in this image. Examining the equal weight gather, Figure 10c, notice that the range of slopes where energy is present is more limited, typically ranging between -0.5 and 0.5 s![]() /km. Much of the sloping energy associated with diffractions centered beneath different midpoints which is visible in Figures 10a and 10b is absent here. Because the equal weight image has poorer lateral resolution than the ideal or deterministic images, several diffraction events which are centered nearby appear as flat diffraction energy in the equal weight gather, but appear as sloping events in the deterministic or equal weight gathers. Two examples of this occur at approximately 1.45 and 1.55 s. Note that although the equal weight image does not resolve diffraction events as well as the deterministic image, it was not the recipient of apriori knowledge of the subsurface velocity field during the imaging process.
/km. Much of the sloping energy associated with diffractions centered beneath different midpoints which is visible in Figures 10a and 10b is absent here. Because the equal weight image has poorer lateral resolution than the ideal or deterministic images, several diffraction events which are centered nearby appear as flat diffraction energy in the equal weight gather, but appear as sloping events in the deterministic or equal weight gathers. Two examples of this occur at approximately 1.45 and 1.55 s. Note that although the equal weight image does not resolve diffraction events as well as the deterministic image, it was not the recipient of apriori knowledge of the subsurface velocity field during the imaging process.
The probabilistic diffraction image, Figure 9d effectively focuses the energy of moderate to strong diffractions. Diffractions seen in the probabilistic image have better spatial resolution than those in the equal weight image. Although some weak diffractions that are present in the ideal image of Figure 9a and the deterministic image of Figure 9b, recall that unlike the deterministic image, the probabilistic image did not receive apriori knowledge of the subsurface velocity field to use during imaging. Instead, such a field was output during the creation of probability weights. Examining the gather corresponding to the probabilistic image, Figure 10d, notice that the gather has a cleaner appearance. Energy present in the probabilistic gather spans a similar range of slopes to that of the deterministic gather, roughly -1 to 1 s![]() /km. Events visible in the probabilistic weight gather tend to be the flat ones indicative of a diffraction at that location. Sloping events corresponding to diffractions at other midpoints tend to be suppressed. This is because the weights are primarily based on semblance, a measure of gather coherence. Thus, the method amplifies the nearly flat coherent events possessing high semblance values. The use of weights tied to coherence explains why some weak diffractions can be suppressed in the imaging process. This synthetic model possesses dense field of diffractions, as is visible in the diffraction data of Figure 7. The moveout curves associated with these diffractions frequently intersect, which leads to the phenomenon of sloping energy corresponding to diffractions centered at a different midpoint intersecting the flat energy in a gather corresponding to a diffraction located at that midpoint. The resulting superposition of sloping and flat energy is less laterally coherent, and thus will have a lower semblance value than if the sloping energy was not present. The effect becomes stronger when the coherent flat event is similarly or less energetic to intersecting events. This behavior can be seen in gently sloping events below 1.4 s in the four gathers. Although these events slope more gently than the event at 1.15 s, their superposition is laterally incoherent. Because the probabilistic imaging process amplifies events that are laterally coherent in these gathers, which is a typical feature of diffractions, they are dramatically suppressed.
/km. Events visible in the probabilistic weight gather tend to be the flat ones indicative of a diffraction at that location. Sloping events corresponding to diffractions at other midpoints tend to be suppressed. This is because the weights are primarily based on semblance, a measure of gather coherence. Thus, the method amplifies the nearly flat coherent events possessing high semblance values. The use of weights tied to coherence explains why some weak diffractions can be suppressed in the imaging process. This synthetic model possesses dense field of diffractions, as is visible in the diffraction data of Figure 7. The moveout curves associated with these diffractions frequently intersect, which leads to the phenomenon of sloping energy corresponding to diffractions centered at a different midpoint intersecting the flat energy in a gather corresponding to a diffraction located at that midpoint. The resulting superposition of sloping and flat energy is less laterally coherent, and thus will have a lower semblance value than if the sloping energy was not present. The effect becomes stronger when the coherent flat event is similarly or less energetic to intersecting events. This behavior can be seen in gently sloping events below 1.4 s in the four gathers. Although these events slope more gently than the event at 1.15 s, their superposition is laterally incoherent. Because the probabilistic imaging process amplifies events that are laterally coherent in these gathers, which is a typical feature of diffractions, they are dramatically suppressed.
|
|---|
|
diffr3-n
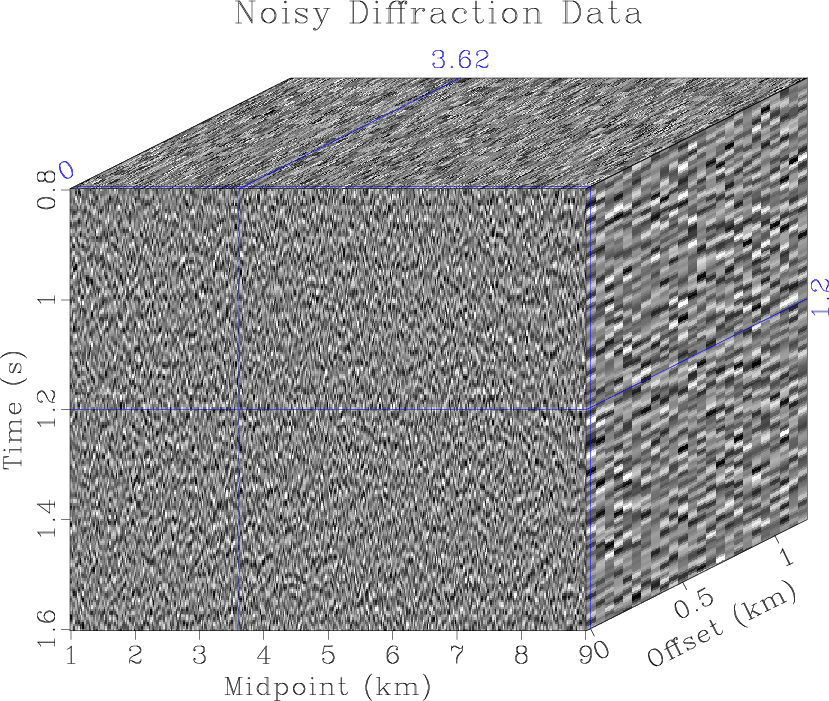
Figure 11. Synthetic dataset consisting of diffractions in constant velocity gradient media modeled for 24 offsets with a 50 m increment from Figure 7 with band passed Gaussian noise added. |
|
|
We repeat the synthetic experiment adding 10-60 Hz band passed Gaussian noise to the diffraction data following modeling to show the robustness of the probabilistic imaging method to noise. The added noise is strong, it has a RMS value approximately ![]() times greater than that of the noiseless diffraction data from the initial part of this experiment. Noisy zero offset data are shown in Figure 11. We perform OVC and again illustrate the probabilistic imaging process in Figure 12. The top left box plot of Figure 12 contains partial images output by OVC after stacking over slope. The slope-decomposed images output by OVC are also used to calculate the weight functions shown in the bottom row of Figure 12. In order to suppress unreasonable values, tapered muting is applied to
times greater than that of the noiseless diffraction data from the initial part of this experiment. Noisy zero offset data are shown in Figure 11. We perform OVC and again illustrate the probabilistic imaging process in Figure 12. The top left box plot of Figure 12 contains partial images output by OVC after stacking over slope. The slope-decomposed images output by OVC are also used to calculate the weight functions shown in the bottom row of Figure 12. In order to suppress unreasonable values, tapered muting is applied to ![]() before calculating the other weights. The three weights are multiplied together to create the combined weight shown in the top middle box plot of Figure 12. Multiplying the combined weight by the partial images in the left box plot creates the weighted partial images in the top right box plot of Figure 12.
before calculating the other weights. The three weights are multiplied together to create the combined weight shown in the top middle box plot of Figure 12. Multiplying the combined weight by the partial images in the left box plot creates the weighted partial images in the top right box plot of Figure 12.

|
|---|
|
synth-weights-n3a-0
Figure 12. Illustration of the probabilistic diffraction imaging process on |
|
|
As with the noiseless example, we generate a suite of images to compare imaging methods. Figure 13a shows an ideal image of this synthetic model consisting of the reflectivity model convolved with a 50 Hz peak frequency Ricker wavelet. This image is the same as that in Figure 9a as we used the same model and wavelet. Figure 13b contains the deterministic image created using migration with the correct velocity. Figure 13c contains an equal weight path integral image generated by stacking the partial images in the top left box plot of Figure 12 over velocity for each midpoint. Figure 13d contains our probabilistic diffraction image, generated by stacking the weighted partial images shown in the top right box plot of Figure 12 over velocity for every midpoint.
We similarly create a series of gathers to illustrating the contribution of different wavefield components to the noisy images at the same midpoint location as the gathers in the noiseless example, ![]() km. Figure 14a contains an ideal gather generated by warping the ideal image in Figure 13a to squared time, decomposing it into constituent slope components, and warping the slope decomposed image back to time. As was the case with the ideal image, this ideal gather is the same as that in Figure 9a. Figure 14b contains a gather contributing to the deterministic image, Figure 13b. This gather is generated by selecting
km. Figure 14a contains an ideal gather generated by warping the ideal image in Figure 13a to squared time, decomposing it into constituent slope components, and warping the slope decomposed image back to time. As was the case with the ideal image, this ideal gather is the same as that in Figure 9a. Figure 14b contains a gather contributing to the deterministic image, Figure 13b. This gather is generated by selecting
![]() for the true migration velocity. Figure 14c contains a gather corresponding to the equal weight image, Figure 13c. It is constructed by stacking the slope decomposed partial images in velocity,
for the true migration velocity. Figure 14c contains a gather corresponding to the equal weight image, Figure 13c. It is constructed by stacking the slope decomposed partial images in velocity,
![]() over velocity. Figure 14d contains a gather corresponding to the probabilistic diffraction image, Figure 13d. It is generated by multiplying the combined weights and the slope decomposed partial images in velocity and stacking over velocity.
over velocity. Figure 14d contains a gather corresponding to the probabilistic diffraction image, Figure 13d. It is generated by multiplying the combined weights and the slope decomposed partial images in velocity and stacking over velocity.



|
|---|
|
synth-n-diffr-response,synth-n-det-img,synth-n-pathint-img,synth-n-prob-dimage
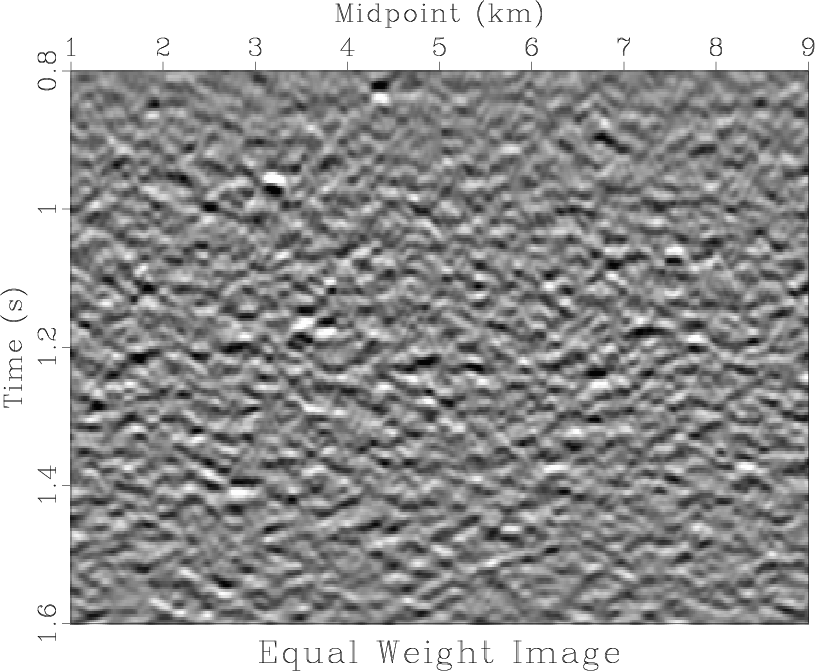
Figure 13. Noisy synthetic model imaging comparison: (a) ideal image consisting of synthetic model reflectivity convolved with a 50 Hz peak frequency Ricker wavelet; (b) deterministic image created by migrating the noiseless synthetic data using its true velocity; (c) equal weight path integral image generated by stacking |
|
|
The noisy deterministic image, Figure 13b, contains significantly more noise than its noiseless counterpart, Figure 9b. Although some of the strongest diffractions seen in the ideal image, Figure 13a can be seen in the deterministic image, it can be difficult to tell which objects are diffractions and which are noise without the ideal image as reference. The corresponding deterministic gather, Figure 14b is also noisy when compared to the ideal gather, Figure 14a. As was the case with the deterministic image, although most of the planar diffraction events from the ideal gather can be seen in the deterministic gather and identified because of their lateral coherence, their amplitudes are typically not much stronger than those of background noise.
The noisy equal weight image, Figure 13c, is corrupted by noise. Few diffractions can be discerned in the image, and it is difficult to say with certainty what features are diffractions and what are simply high amplitude noise. This behavior is reflected in the corresponding equal weight gather, Figure 14c, which contains numerous high amplitude events not present in the noiseless equal weight gather, Figure 10c.
The probabilistic diffraction image shown in Figure 13d is resilient to noise, featuring most of the diffractions visible in Figure 9d. Background noise, though present, is not as powerful as the strong diffractions, and is significantly suppressed relative to the noisy deterministic and equal weight images. Features in the probabilistic weight gather, Figure 14d appear more laterally coherent and less noisy than those in the deterministic or equal weight gathers, signifying that the energy present is far more likely to be caused by diffraction. Indeed, comparing this noisy probabilistic weight gather to the noiseless one in Figure 10d shows that most events appearing in the noisy gather have corresponding events in the noiseless one. Also note that the noisy deterministic image received perfect apriori knowledge of underlying velocity to use in the migration process, while this probabilistic image did not.




|
|---|
|
synth-n-diffr-response-txp-0,synth-n-slice-tpx-0,synth-n-const-gath-0,synth-n-wtd-gath-0
Figure 14. Slope gathers centered at 3.62 km, directly above the diffractior corresponding to: (a) ideal image, Figure 13a; (b) deterministic image, Figure 13b; (c) equal weight image, Figure 13c; (d) the probabilistic diffraction image, Figure 13d. |
|
|
|
|
|
|
A probabilistic approach to seismic diffraction imaging |