|
|
|
|
Solving 3D Anisotropic Elastic Wave Equations on Parallel GPU Devices |
Any numerical implementation of equations 1-3 requires specifying both a computational mesh and a numerical discritization scheme. We define a
![]() computational grid and use
computational grid and use ![]() time steps such that a grid point in space and time can be represented by quadruplet
time steps such that a grid point in space and time can be represented by quadruplet
![]() , where the integer counters have the ranges
, where the integer counters have the ranges ![]() ,
, ![]() ,
, ![]() and
and ![]() . Continuous wavefield displacements at a given location are represented on the discritized grid as
. Continuous wavefield displacements at a given location are represented on the discritized grid as
| (4) |
![$\displaystyle \partial^2_{tt} u_j \approx D_{tt} u_j^{p,q,r\vert n} = \frac{1}{...
... \left[ u_j^{p,q,r\vert n+1}-2 u_j^{p,q,r\vert n}+u_j^{p,q,r\vert n-1} \right].$](img47.png) |
(6) |

|
|---|
|
starOfCubes
Figure 1. The 25 data points required to approximate a first derivative at the center shaded point using a FD stencil of 8 |
|
|
These difference operators allow us to specify a time-stepping scheme to calculate wavefield displacements in 3D elastic anisotropic media throughout the model domain. However, additional work is required to treat both the free-surface boundary and to minimize the energy in non-physical exterior boundary reflections. Implementing free-surface boundary conditions is fairly straightforward on a uniform grid because a (topography-free) free surface can be placed directly on the boundary which, assuming the free-surface normal vector points in the ![]() -direction, allows us to set
-direction, allows us to set
![]() where
where ![]() . We treat the other boundaries using a cascade of two operators comprised of absorbing boundary conditions (ABCs) derived from a one-way wave equation (Clayton and Enquist, 1977) and an exponential-damping sponge layer (Cerjan et al., 1985) of at least 48 grid points.
. We treat the other boundaries using a cascade of two operators comprised of absorbing boundary conditions (ABCs) derived from a one-way wave equation (Clayton and Enquist, 1977) and an exponential-damping sponge layer (Cerjan et al., 1985) of at least 48 grid points.
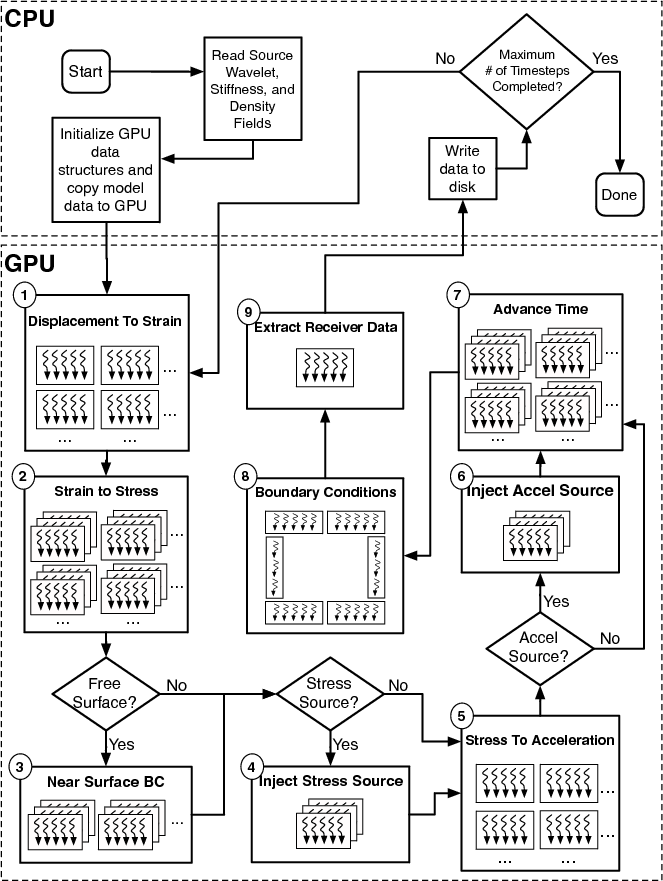
Figure 2 presents the nine procedural steps in the 3D FDTD algorithm required for calculating each forward time-step: 1) Compute strains
![]() from wavefield displacements according to equation 1; 2) Calculate stresses
from wavefield displacements according to equation 1; 2) Calculate stresses
![]() from constitutive relationship
from constitutive relationship ![]() and
and
![]() according to equation 2; 3) Enforce the free-surface boundary condition (if required); 4) Inject a stress source (if not an acceleration source); 5) Compute acceleration from stress tensor (i.e.,
according to equation 2; 3) Enforce the free-surface boundary condition (if required); 4) Inject a stress source (if not an acceleration source); 5) Compute acceleration from stress tensor (i.e.,
![]() ); 6) Inject an acceleration source (if not a stress source;
); 6) Inject an acceleration source (if not a stress source;
![]() ); 7) Compute the forward time step from current and previous wavefield values; 8) Apply boundary conditions through cascade of ABC and sponge operators; and 9) Output data/wavefield as required. The next section details our GPU implementation of these steps.
); 7) Compute the forward time step from current and previous wavefield values; 8) Apply boundary conditions through cascade of ABC and sponge operators; and 9) Output data/wavefield as required. The next section details our GPU implementation of these steps.
|
|---|
|
flow
Figure 2. Control flow for FDTD algorithm implemented on a single GPU, including the division of tasks between the CPU host and GPU device. |
|
|
|
|
|
|
Solving 3D Anisotropic Elastic Wave Equations on Parallel GPU Devices |
![$\displaystyle \partial_x u_j \approx D_x [ u_j^{p,q,r\vert n}] = \frac{1}{\Delt...
...^4 W_\alpha \left( u^{p+\alpha,q,r\vert n}_j-u^{p-\alpha,q,r\vert n}_j \right),$](img39.png)